このマンティスエビ風のロボットアームは卵を割ることができます

科学者がロボット工学のインスピレーションとしてマンティスのエビを見たのはこれが初めてではありません。 2021年、私たちはハーバード大学の研究者について報告しました。 生体力学的モデル マンティスエビの強力な付属物のために、その動きを模倣するために小さなロボットを構築しました。 Mantis Shrimpで珍しいのは、ラッチングとスナップアクションが発生するときに1ミリ秒の遅延があることです。
ハーバードチームは、4つの異なる印象的な段階を特定し、それが強膜による最初のラッチング後に急速な加速を生成するメカニズムのジオメトリであることを確認しました。短い遅延は、繰り返し使用することで、ラッチングメカニズムの摩耗を減らすのに役立ちます。
新しいタイプの動き
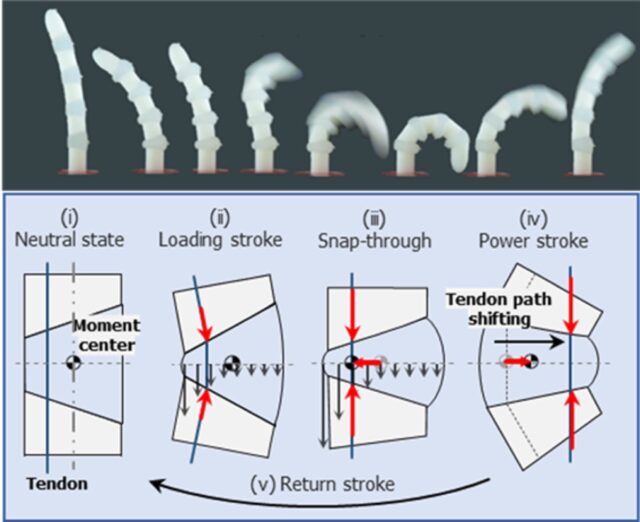
高弾性トルク反転メカニズム(HERTRM)の動作原理は、蓄積されたエネルギーが瞬時に放出される臨界点に達するまでエラストマージョイントを圧縮することを伴います。
クレジット:Science Robotics、2025
ソウル国立大学の共著者であるKyu-Jin Choは、ロボソフトグランドチャレンジに参加したときに、大学院生としてソフトロボット工学に興味を持ちました。彼の研究の一部は、たとえば、溶接や塗装のために組み立てラインでよく使用されるタイプであるいわゆる「ソフトロボットマニピュレーター」の強さをテストすることでした。彼は、適用された力の下で形状の意図しない変形に気づき、基礎となるメカニズムは、マンティスのエビがどのようにパンチするか、またはノミがそのサイズと比較して非常に高くて遠くジャンプする方法と類似していることに気付きました。
実際には、 チョのチーム 以前に作成されました ノミ風のカタパルトメカニズム ミニチュアジャンプロボットの場合、彼のラボが開発した過弾性トルク反転メカニズム(HERTRM)を使用しています。トルクの反転を悪用するには、通常、複雑な機械的成分を組み込むことが含まれます。しかし、「私はそれを応用することに気付きました [these] ソフトロボット工学の原則は、複雑なメカニズムなしに新しいタイプの動きを作成することを可能にする可能性があります。」 チョは言った。
現在、彼はその仕事に基づいて、Hetrmを構造設計ではなく材料特性に依存するソフトロボットアームに組み込むことができました。基本的には、交互の過弾性と剛性セグメントを備えた柔らかいビームです。
「私たちのロボットは、柔らかくて伸縮性のある素材で作られています。 チョは言った。 「内部には、ロボットを非常に速く動かすために、エネルギーを蓄えて一度にすべてをリリースする特別な部分があります。このロボットは、手をつかんだり、床を横切ってcraいたり、高くジャンプしたりすることさえできます。それはすべて、単純な筋肉を引っ張るだけで起こります。」
ソース参照
#このマンティスエビ風のロボットアームは卵を割ることができます

